Determination of Reference Frames
High-precision and long-term stable Terrestrial Reference Systems (TRS) are fundamental for positioning and navigation on the Earth's surface and in space, for the representation of the Earth’s gravity field, and for referencing various geophysical phenomena, such as sea-level variability or plate tectonics. Since geodetic observations include extraterrestrial objects such as artificial satellites and quasi-stellar radio sources (quasars), Celestial Reference Systems (CRS) are required, too. The systems are realized by so-called Reference Frames (CRF, TRF) in the form of positions and velocities of a set of points on the Earth surface or in space, respectively. For the transformation between the frames, in addition to the relativistic time scaling, the relative orientation is needed, which is given by the Earth Orientation Parameters (EOP). For a consistent realization, the coordinates in TRF and CRF and the EOP should to be estimated in a joint adjustment with well-defined datum constraints.
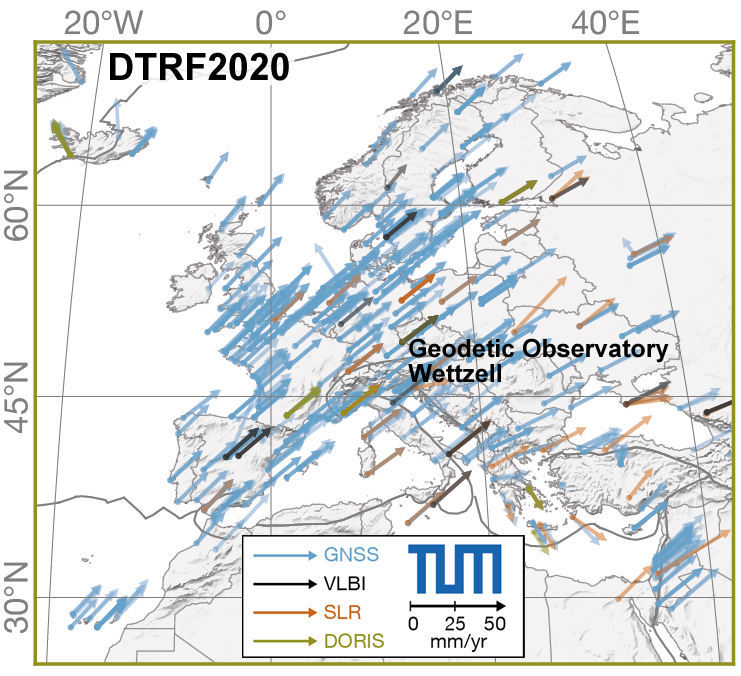
Terrestrial reference systems are realized by combining observations of the space-geodetic techniques: VLBI, SLR, GPS, and DORIS. An essential role plays the geodetic datum (coordinate origin, scale and orientation). Its definition (geocenter, speed of light, axis of rotation) and the methods for its realization are investigated in detail, taking advantage of the respective strengths of each technique. Another objective is the handling of non-linear station motions for an improved realization of the terrestrial reference system. The investigations also include the realization of the celestial reference system and Earth orientation parameters.
Arcisstraße 21
80333 München